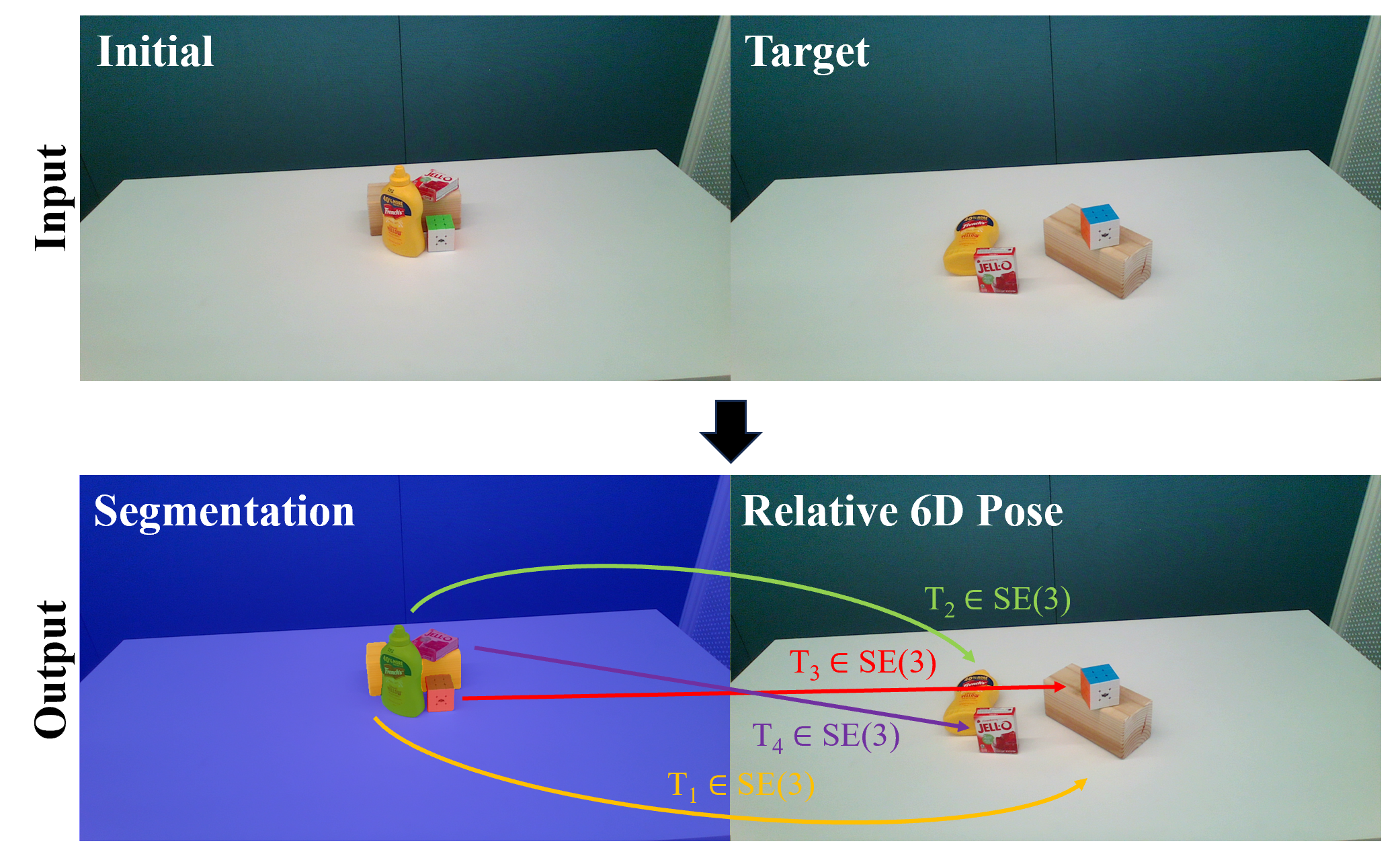
Masters Thesis: 6D Unkown Object Rearrangement | Sept 2023 - May 2024
Worked under Prof. Jia Deng to build a benchmark dataset for relative 6D pose estimation of multiple unknown objects.
Lab Website
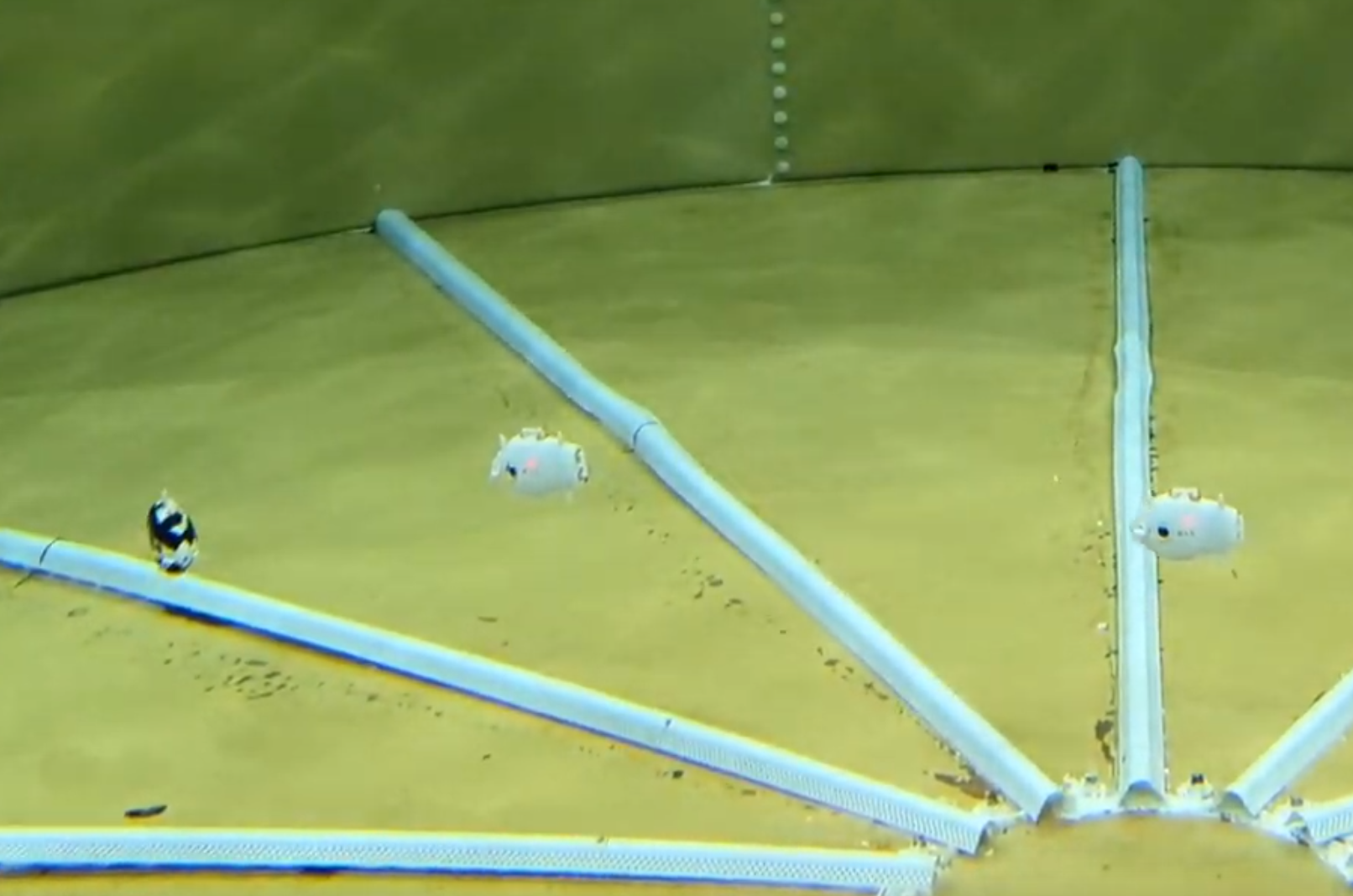
Blueswarm | Aug 2022 - Aug 2023
Implemented new visual system for daylight detection of other Bluebots, a system of fish inspired underwater swarm robots. Renovated 20,000 gal swimming pool laboratory and served as lab manager.

Bee Chips | July 2022 - Aug 2022
Designed and ran full day honeybee experiments to test the performance of the Bee Chips designed by Dr. Daniel Palmer at Cornell on a team of 3. Instrumented the hive and feeder station with cameras and extracted bee timing data as ground truth to verify the effectiveness of the system.
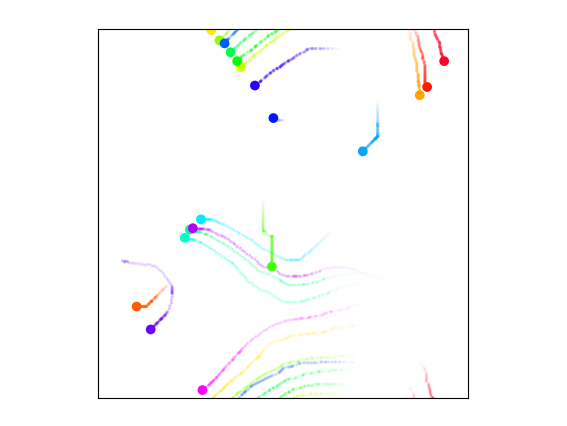
Collective Braitenberg Vehicles | Jan 2022 - Sept 2022
Wrote an opensourced python simulation of the collective behavior of collectives of Braitenberg Vehicles (BV). Modified original BV design to include a directional light on the back of each agent to enable dynamic interactions. Ran parameter sweeps to characterize the design space of several switchable emergent behaviors.
Github
I presented these results at the DARS conference in November 2022.
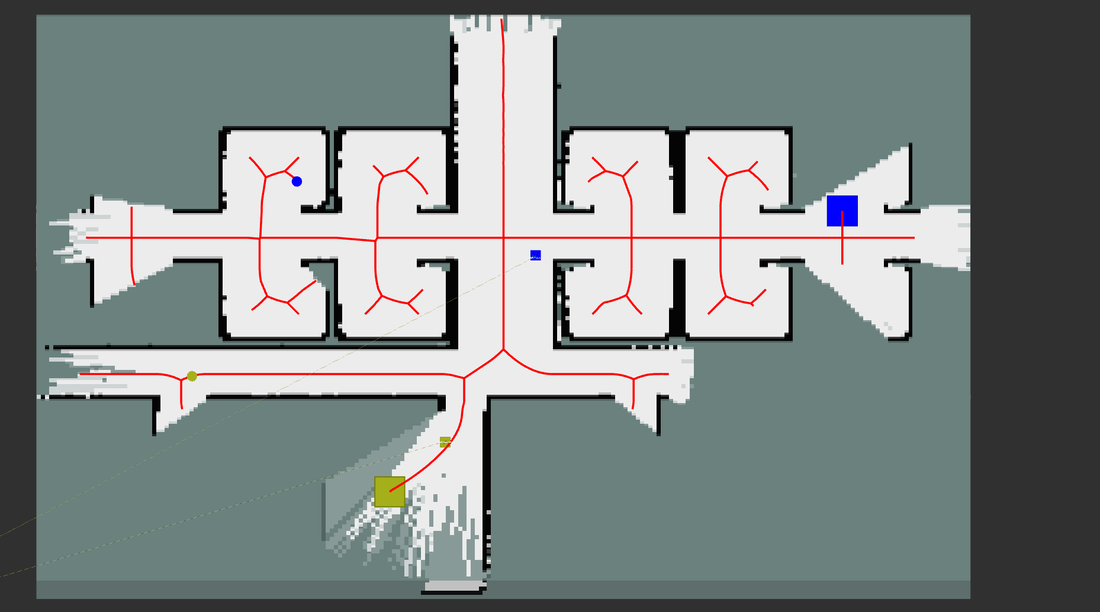
Multirobot Exploration | June 2021 - Aug 2021
Wrote graph-based multirobot exploration algorithm in ROS and simulated it on a realistic 2D simulator called Stage. Applied rendezvous strategies to reduce inefficiencies in exploration and make the algorithm more robust to different types of environments.
Flow Sensor Analysis and Paper | Sept 2020 - May 2021
Built custom wind tunnels to analyze the characteristics of the sensor. Carried out experiments and presented results at DARS-SWARM 2021 conference. First authored paper: A Customizable, Low-Cost Alternative for Distributed 2D Flow Sensing in Swarms in review for publication in Springer: Artificial Life and Robotics.

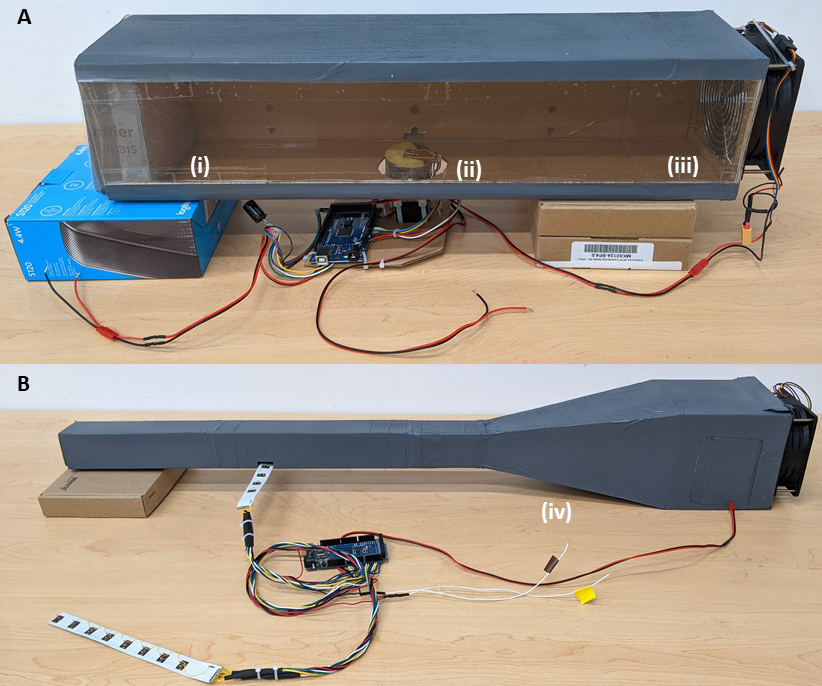
Flow Sensor V2 | Aug 2020
Optimized the design of the flow sensor for size, heat dissipation and manufacturability with a flexible pcb. The magnitude thermistor is implemented as a surface mount component. The flexible board is folded into a loop with a long tail to easily mount on a testing board. The flexible substrate also has a considerably lower thermal mass, which reduces the parasitic heat loss. Honeybee for scale.

Flow Sensor Array | Aug 2020
With the success of the thermistor flow sensor, I stripped away the additional direction sensors and set up an array of the individual magnitude sensors. These sensors are more easily calibrated and interpreted so this allowed us to capitalize on the final month of acceptable weather for field tests. The array of flow sensors spanning the testing arena provide an idea of the distribution of flow speeds along the central column of air and as it dissipates out. These sensors were designed to be deployed in the field so they are quick to setup and remove and have a minimal impact on the honeybees behavior.
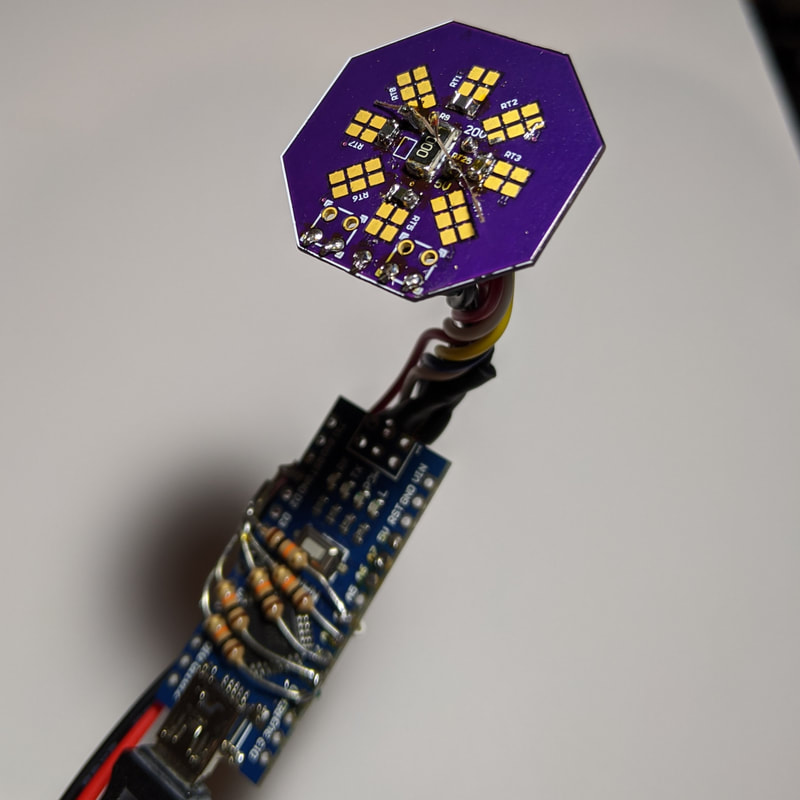
Flow Sensor V1 | Jan 2020 - June 2020
Tasked with designing a 2D flow sensor to observe the behavior of a swarm of honeybees on a flat surface. Awarded LSAMP grant to pursue this research over the summer at Cornell. Presented work at LSAMP & ESMI Symposium in June.
Design consists of a central heating element and 5 thermistors. 4 arranged around the heating element and 1 above. Each of these thermistors is first brought to temperature, then when airflow blows across them they cool down proportionately to the speed of the flow. By reading the resistance of the thermistor, we can then infer flow speed. Then looking at the relative airspeeds across the 4 thermistors we can deduce the flow direction. The top thermistor is further removed from parasitic heating and deflection of the flow, thus providing a clearer reading of the flow speed. Measurements and calculations are done in real time on an Arduino Nano, and sent to a laptop.
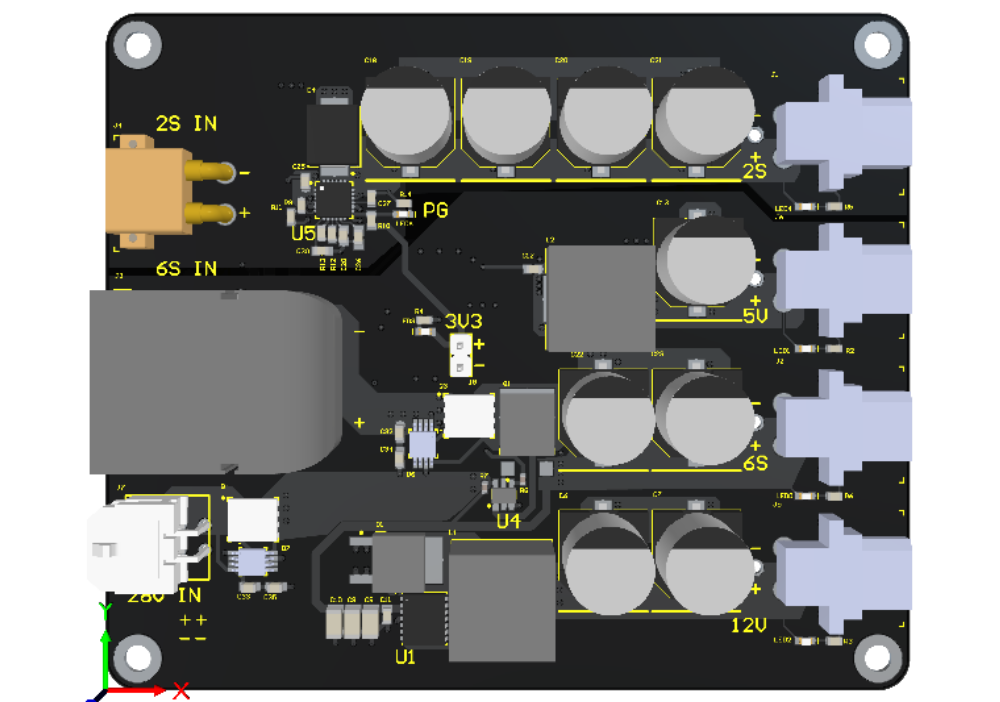
Power Distribution Board | Dec 2019 - May 2020
Designed the Power Distribution Board (PDB) for my project team's autonomous plane. Communicated with subteam members across the mechanical and software teams to determine design constraints of the project. Learned significant power electronics design of converters, as well as power electronics routing techniques to build a specific and efficient converter for the various power levels required by the subsystems of the plane. Includes battery switching circuit and various input protections.